En este directorio podremos encontrar recursos para la investigación y el diseño de una solución mioeléctrica y que responda a la evolución del prototipo de la investigación I
Paso 0
Con la información que tenemos en el punto inicial, necesitaremos varias partes para desarrollar una prótesis mioeléctrica:
– Sensor mioeléctrico, lo más interesante que hemos visto por ahora son diseños advancer technologies:

http://www.advancertechnologies.com/p/muscle-sensor-v3.html
Hay empresas que venden el kit con la placa arduino para hacer el procesamiento de señal. Además hay opciones para usar tejido
conductor, aunque esto tiene todavía problemas que solucionar por efecto de polarización.





http://www.advancertechnologies.com/2013/03/diy-conductive-fabric-electrodes.html
Otras opciones de investigación si queremos revisar el diseño de estos sensores para usar barras de acero inoxidable son:
Para una solución final probablemente un forro con electrodos y un diseño más avanzado es necesario, de este tipo:
http://www.google.com/patents/US8591599
– Sistema de procesamiento de señal, podríamos usar cualquier miniplaca para sistemas wearables, cosas como la lilypad:

http://arduino.cc/en/Main/ArduinoBoardLilyPadUSB
Quizás incluso un formato un poco más grande dependiendo de dónde tenga que ir montado
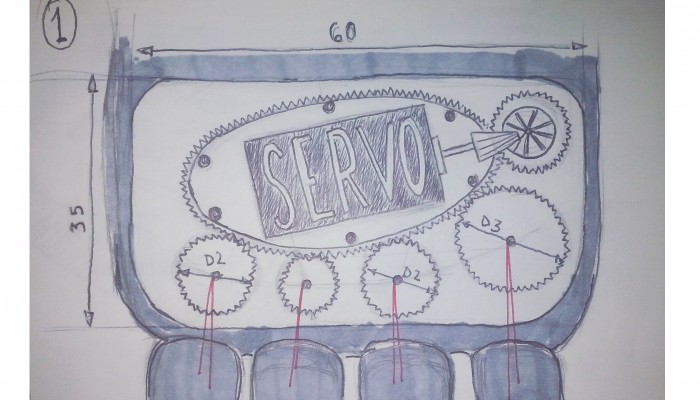
– Exoesqueleto y sistema de movimiento, para eso podemos usar unos servos enganchados en los tensores del exoesqueleto. Como
solución inicial se usará la de Enable, quizás no sea la más adecuada para engancharle servos, pero sería lo más sencillo para
un prototipo aunque no fuese realmente adaptable.

Entre las cuestiones a tener en cuenta tenemos que la solución mioeléctrica debe ser rápida, tanto en la detección y procesado de la señal como en la generación de movimiento, es importante saber en qué punto un usuario estaría incómodo con la velocidad de reacción del movimiento.
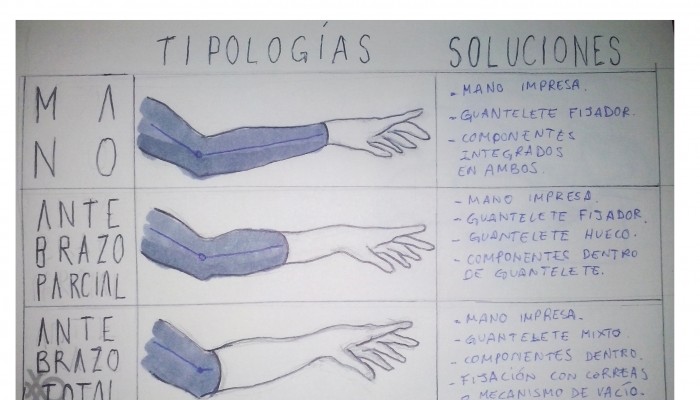
Lo ideal es que todas estas partes fuesen adaptables, fácil de colocar de múltiples formas y tamaños dependiendo de las necesidades de cada
usuario.
Es necesario investigar más las iniciativas en este tema para comprobar si hay algún proyecto abierto trabajando en esto.
Hay que diferenciar entre los proyectos que trabajan en soluciones más robóticas de los que son realmente para la ortopedia.
Paso 1
PRIMERA REUNIÓN DEL GRUPO “DESARROLLO”
(Miércoles, 19 de noviembre de 2014, Duración aproximada: 3 horas)
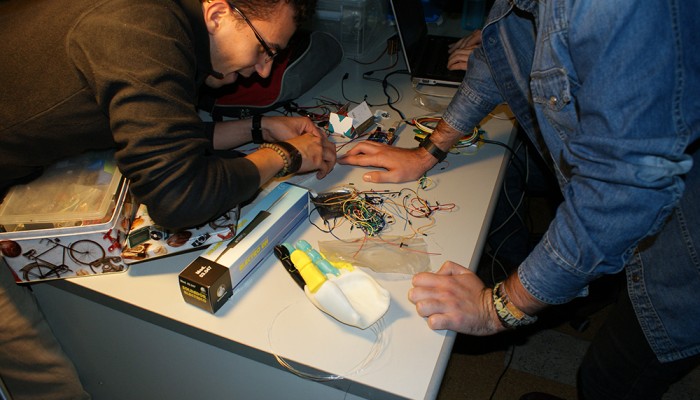
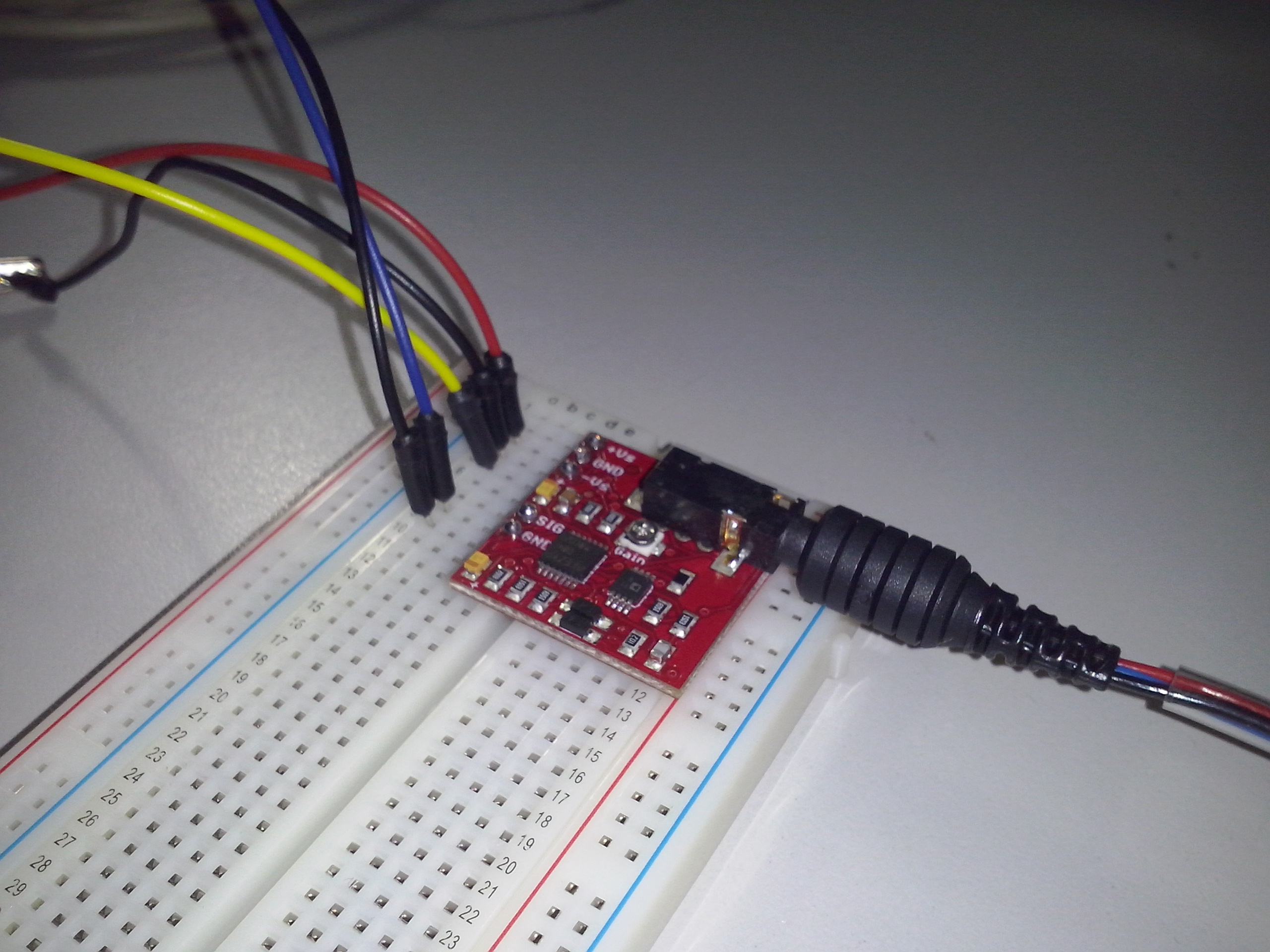
Tras el trabajo que algunos miembros del equipo habían realizado de forma autónoma, en esta primera reunión se realizó el montaje básico de todos los elementos necesarios para el registro y transformación de la señal mioeléctrica. Estos elementos incluyeron:
- Arduino.
- Sensores mioeléctricos.
- Almohadillas con gel conductor.
- Pilas
- Cables para las conexiones
- Breadboard
- Programas informáticos para la visualización de la señal y para la carga de programas en arduino.
- Servo.
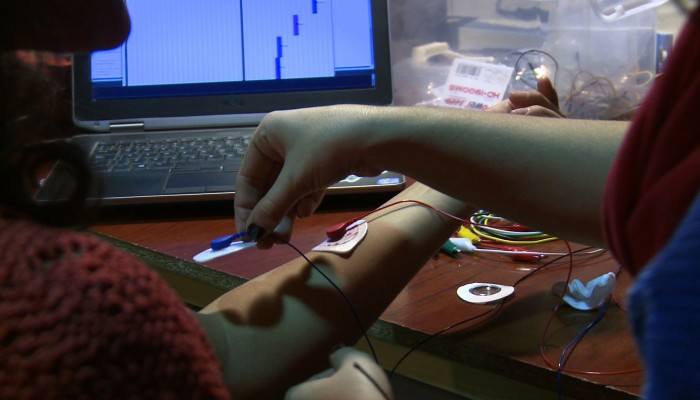
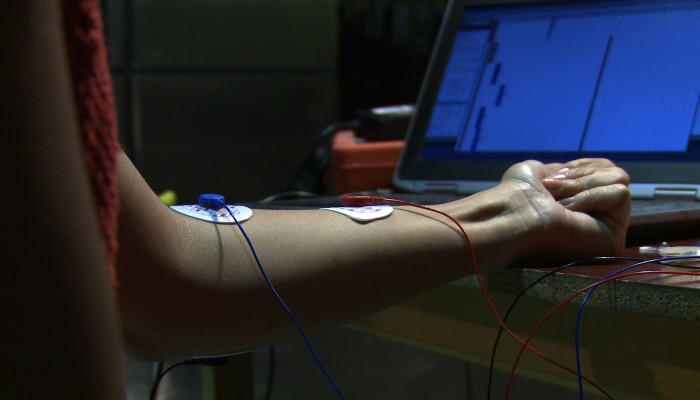
Se realizó asimismo una prueba del funcionamiento de los sensores en el antebrazo. El protocolo que hemos seguido para la colocación de los electrodos es es siguiente:
1º. Limpiamos la piel con un producto desmaquillante.
2º. Colocamos el electrodo de tierra/referencia en la parte inferior más cercana al codo.
3º. Sensores de trabajo: uno de ellos se situó en la parte media del antebrazo, el otro a
unos 8 cm hacia la muñeca.
Resultados:
- Aunque el sistema de registro aún no es estable, sí conseguimos mover el servo mediante la actividad muscular.
- Se plantea la posibilidad de sustituir el sistema de alimentación con pilas por el de la corriente eléctrica alterna.
Próximo objetivo: simplificar el montaje de todos los elementos y hacerlo estable, de modo que cualquiera pueda llegar a la nave y utilizarlo para realizar las pruebas necesarias.




























Paso 2
SEGUNDA REUNIÓN DEL GRUPO “DESARROLLO”
(Miércoles, 18 de febrero de 2015, Duración aproximada: 1`5 horas)
Objetivo: mejorar el procedimiento/protocolo que nos permita controlar el movimiento del servomotor.
Resultados: tras diversas pruebas se puso de manifiesto un funcionamiento anómalo del servo que nos impidió continuar con la sesión. Esto podría deberse a un problema con la alimentación, ya que en esta sesión no dispusimos de todos los elementos de trabajo y fue necesario variar el diseño que se probó inicialmente.


Futuras tareas:
– Con la ayuda de Álex, Miguel replicará el diseño de forma autónoma con material propio, para así descartar (o no) el problema con la alimentación.
– Otro miembro del equipo se ha ofrecido para elaborar una “estación de trabajo” en la que poder situar todos los elementos de forma estable.
Observaciones:
El trabajo del grupo de desarrollo está exigiendo que varios miembros del equipo trabajen de forma autónoma en sus casas, bien en aspectos de confección/construcción casera, bien delante de un ordenador. Se agradece mucho este trabajo casi “invisible”, pero es de gran importancia que durante las reuniones de grupo tengamos todo el material disponible para poder llevar a cabo los experimentos de forma sistemática y con la menor variabilidad posible, así como por cuestiones de tiempo.
Paso 3
TERCERA REUNIÓN DEL GRUPO “DESARROLLO”
(Jueves 12 de Marzo de 2015, Duración aproximada: 1’5 horas)
Asistentes: Alex, Misael y Miguel.

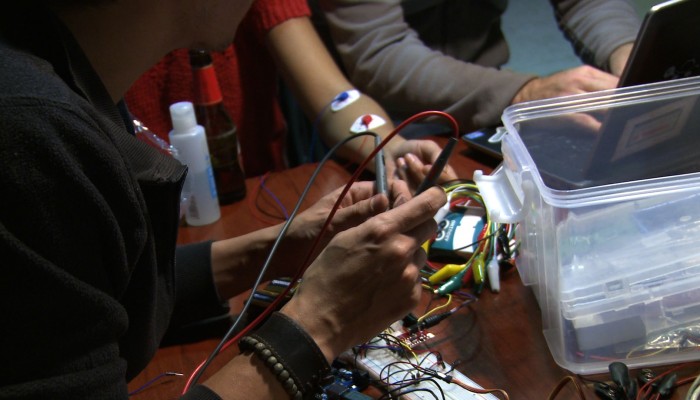
Objetivo: montar el sistema arduino – sensor – servo y empezar a trabajar con él.
Resultados: éxito rotundo. Conseguimos montar el sistema servo – arduino – sensor sin muchas complicaciones. Se colocaron los sensores en el brazo de Misael y tras probar sucesivos cambios en la programación se consiguió una respuesta bastante fiel del servo. Conseguimos que éste girase 180º cada vez que Misael ejercía tensión con el biceps.
Futuras tareas:
– La estación de trabajo. Si José Sancho no puede traerla, Miguel se encargaría de ella. Es bastante prioritario pues necesitamos una base fija que permita la realización y repetibilidad adecuada de los experimentos.
– Misael traerá un potenciómetro que permitirá simular los impulsos eléctricos del cuerpo, para que no sea necesario siempre que una persona tenga los electrodos conectados.
Observaciones:
A lo largo de la sesión de trabajo tuvimos que cambiar los electrodos pasada una hora aproximadamente porque perdían sensibilidad. Parece que esto será más problemático que la fuente de alimentación, que no dio problemas significativos.

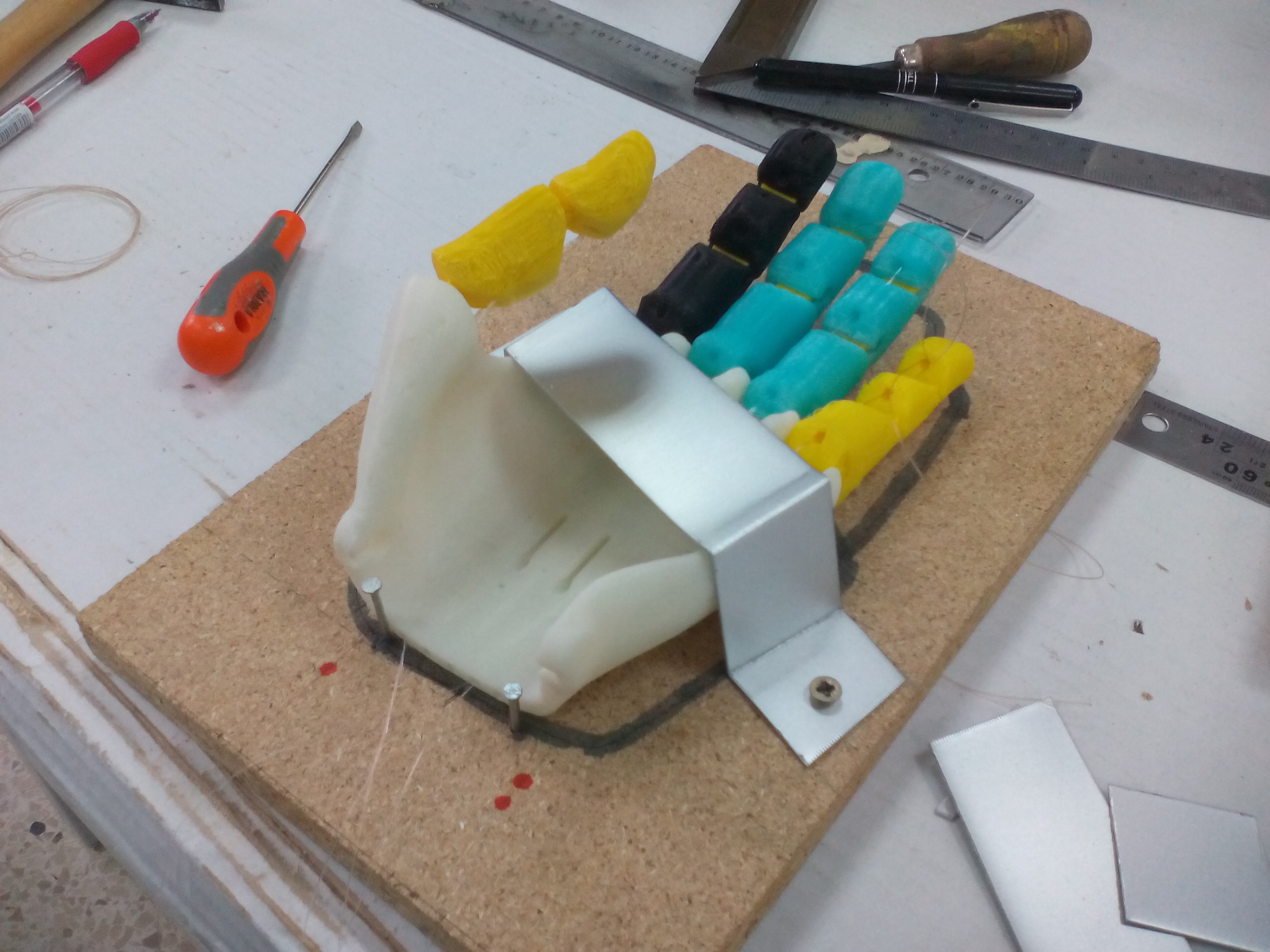
Tuvimos que usar una estación de trabajo muy improvisada. La que se haga con más tiempo tiene que aguantar bastantes esfuerzos, pues el servo motor genera mucha fuerza.
Miguel se lleva la mano a casa para arreglarle los hilos tensores y tomarle medidas precisas.
Paso 4
Empezamos a trabajar sobre una plataforma de ensayos para poder incorporar las siguientes pruebas. Nos ponemos en contacto con Oriol Bertomeu, el creador de Morph, un proyecto similar al nuestro: https://www.flickr.

Paso 5
CUARTA REUNIÓN DEL GRUPO “DESARROLLO”
(Martes, 14 de abril de 2015, Duración aproximada: 2`5 horas)
Asistentes:
Alex, Misael, Miguel y Paula.
Objetivo:
Continuar con el montaje el sistema arduino – sensor – servo hasta conseguir que el servo responda de forma coherente al movimiento generado por a) un potenciómetro y b) la contracción muscular.
Resultados:
Durante las pruebas con el potenciómetro: se observaron anomalías en el movimiento del servo.
Durante las pruebas con el sensor, en las que incorporamos la visualización de la señal, vimos que:
1. La señal electromiográfica se detecta de forma adecuada: las contracciones musculares se traducen en incrementos/decrementos proporcionales en la señal registrada.
2. La programación que manda al servo las órdenes de “girar 180 grados” y “volver a los 0 grados” (abrir-cerrar la mano) también es la adecuada: una breve pausa en el registro de la señal indica el momento en le que el servo debería responder y ésta coincide con la contracción y distensión real del brazo.
3. Parece que la programación adecuada pasa por establecer 2 thresholds en un rango bastante amplio para los movimientos de contracción y distensión. En concreto, la distensión del brazo deberá asociarse a una bajada bastante fuerte en la señal para evitar la apertura prematura de la mano.
4. El servo no responde bien a las órdenes anteriores. Aunque la programación envía las órdenes adecuadas, el servo no responde bien a ellas. Probablemente problemas con la alimentación del propio servo hayan contaminado las sesiones realizadas hasta ahora.
Tareas futuras:
1. Replicar el experimento con un servomotor distinto que aportará Miguel.
2. Superponer o añadir a la visualización de la señal una nueva entrada que indique los momentos en los que, efectivamente, el sujeto contrae-relaja el músculo. De este modo será posible un análisis más preciso de la señal.
3. Recabar información sobre las características de la señal electromiográfica que permita ajustar los umbrales adecuados de contracción-distensión.
4. Estandarizar el registro de modo que siempre se realice en el mismo músculo, posición etc.
Paso 6
QUINTA REUNIÓN DEL GRUPO “DESARROLLO”
(Jueves, 30 de abril de 2015, Duración aproximada: 2`5 horas)
Asistentes:
Alex, Miguel y Paula.
Objetivo:
Probar el montaje y la programación empleadas en la sesión anterior con un servo.
Resultados:
De forma accidental descubrimos que el movimiento que estábamos realizando para generar la contracción muscular en el antebrazo (apretar el puño) no era el idóneo, y que se logra una contracción y una señal mucho más estable e intensa cuando el movimiento consiste en estirar los dedos de la mano hacia “atrás”.
El servo respondió de forma muy precisa con un threshold superior en torno a 300 y el inferior
Tareas Futuras:
1. Continuar con las pruebas.
2. Lograr conectar todos los elementos de forma estable y de modo que ocupen el menor