Este grupo de trabajo intentará reflejar todos los pasos dados dentro del desarrollo del prototipo, es decir, las capacidades de las impresoras 3d al alcance del proyecto y la evolución de los modelos dentro de los materiales experimentales.
Paso 0
Recapitulamos sobre una infraestructura de trabajo suficiente que consta de 3 Reprap Prusa I2 + Makerbot+ Reprap Prusa I3+ Sense 3d+ Kinect.
Paso 1
Nos reunimos en distintas convocatorias los grupos cerojugadores// ehcofab // laresidencia.cc y despues de decidir que en principio no habia necesidad de probar con nuevos materiales hasta las primeras conclusiones, comenzamos a desarrollar el prototipo.
Paso 2
Utilizando las capacidades de la kinect, escaneamos en 3 fases la extremidad. Surgen una serie de limitaciones debido al tamaño objetivo, pero decidimos seguir adelante planificando la incorporación de un molde preciso de escayola llegado el momento.
Paso 3
En base al modelo de la Cyborg beast hand, y re-escalando al 40%, obtenemos unas primeras piezas con las que tomar las siguientes decisiones.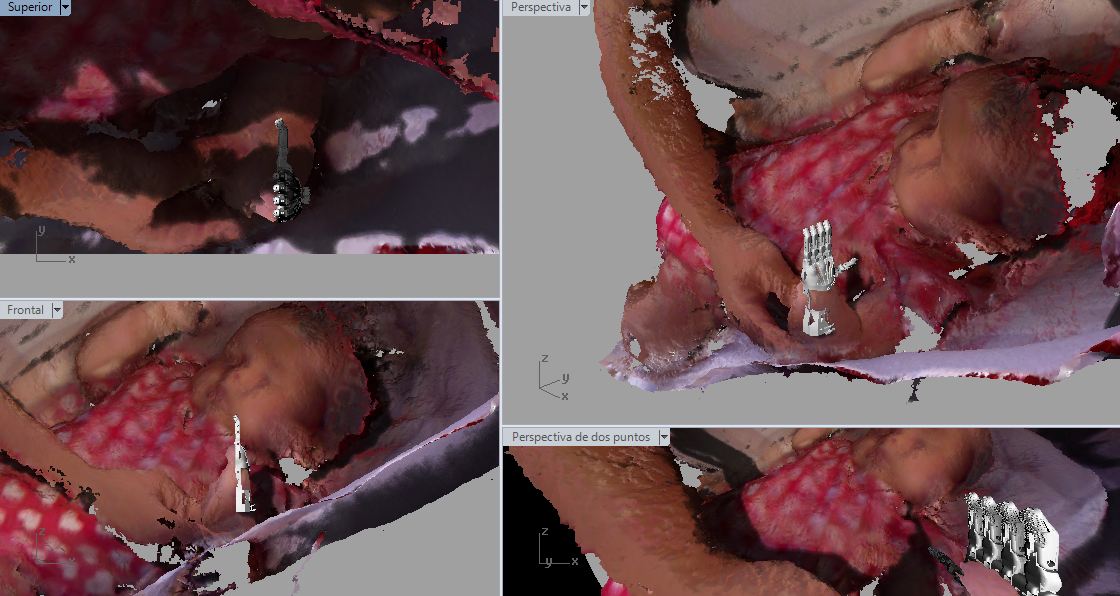
Paso 4
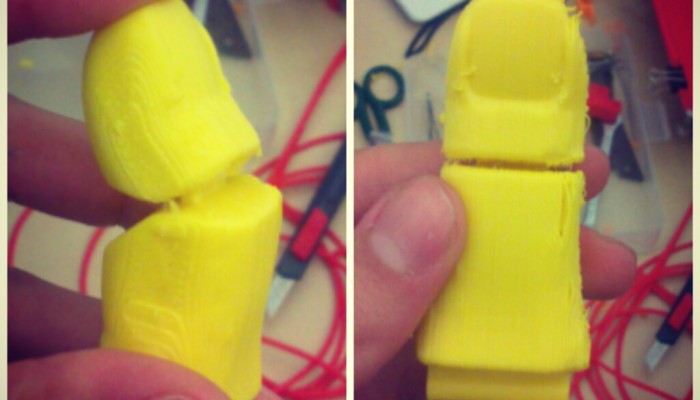
Impreso el primer modelo decidimos aumentar su escala x 2, pues los errores heredados del escaneo y el ajuste en el programa de modelado han provocado una primera versión demasiado pequeña.


Paso 5
De forma paralela a las pruebas de la cyborg beast hand, decidimos empezar a desarrollar un modelo propio adaptado para bebes. Quizás una versión tridáctila se adapta mejor a las necesidades de resistencia para los primeros apoyos. Así además podemos re-adaptar el modelo a las piezas de unión ya estudiadas. (Todo esto surge de conversaciones en el encuentro del 18 de mayo)
Paso 6
Se incorpora al equipo de escáner el sensor «Sense 3D» y así obtener un modelo más fiable, y sobretodo más rápido, de la extremidad para la incorporación de la prótesis. Además contactamos con un par de estudios de relojería para que nos apoyen con las piezas de unión y tensores de los prototipos.
Paso 7
Decidimos sacar un modelo completo de cyborg beast hand para que la familia se lo pueda llevar para probarlo en los meses de verano. Imprimimos la prótesis, como decíamos al 80% y le incorporamos una serie de elementos:
- Gauntlet modelo 6.3 Original.
- Tejido de algodón cosido para el contacto con la piel
- Tanza para el tensor que cierra la mano de hilo de pescar.
- Tensor que abre la mano a partir de goma elástica

Paso 8
Después del encuentro de aRtropocode incorporamos un nuevo material flexible, Filaflex, y con este nos podemos introducir a producir versiones de la ya mejorada Flexihand 2. Pasamos a probar sobre esta versión al 100% las distintas modalidades de articulaciones de cada dedo. Es decir, al incorporar este material flexible podemos prescindir de todo el sistema de retracción basado en la goma elástica que teníamos, lo que permite el refinamiento del modelo y su sencillez. Para conseguir esto se sustituyen las articulaciones entre falanges con dicho material flexible por lo que se incorpora esa tensión a toda la pieza. La segunda versión es una evolución de esta, imprimiendo todo el dedo en el material flexible, el cual tiene la resistencia suficiente para permitir agarrar objetos con seguridad. Esto aunque resulta más caro nos hace aprender que el tacto con la piel que ofrece esta «goma» Filaflex se hace más agradable y mas aún para la autonomía de una niña pequeña. Entendemos pues que estas serán las nuevas maneras de trabajar.







Paso 9
Mientras dejamos esta prótesis, y su Gauntlet, al equipo de Desarrollo, tomamos la petición de la familia de prototipar un nuevo modelo a escala para Paula en la primavera de 2015, pasando por las fases de medida y producción apropiadas.
